


Results 1 to 10 of 29
Thread: my i3v 10" build
Threaded View


-
12-13-2014, 09:47 PM #14Student

- Join Date
- Nov 2014
- Posts
- 34
Success!!
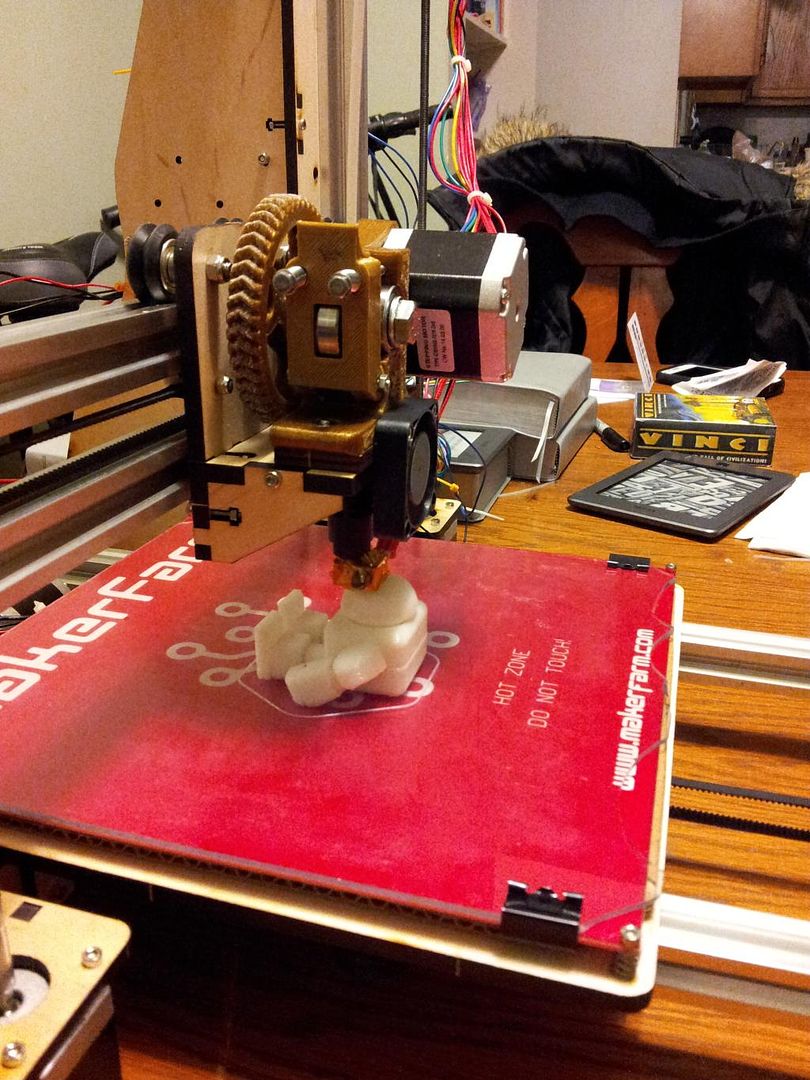
Pictures have been a bit sparse die to phone issues. I finally finished up the printer build after about 15 hours put in. A couple of little issues cropped up in the end run:
The cheap 12v power supply didn't come with mounting screws. Another trip to home depot is in the works. I also realized I only had red wire for the power connections. So all those will be re-done after the home depot trip.
I should have followed Ryan's advice with the extruder build. It was the only video that I felt was a little rushed and when it was done I didn't feel 100% confident about it. Of course, when the assembly was complete filament wouldn't feed, it wouldn't even load into the slot. So I removed it, took everything apart and watched a different video that went more in detail about aligning all the pieces, how loose to keep the hobbed bolt, etc. I popped it back on and set up for the 1st print!

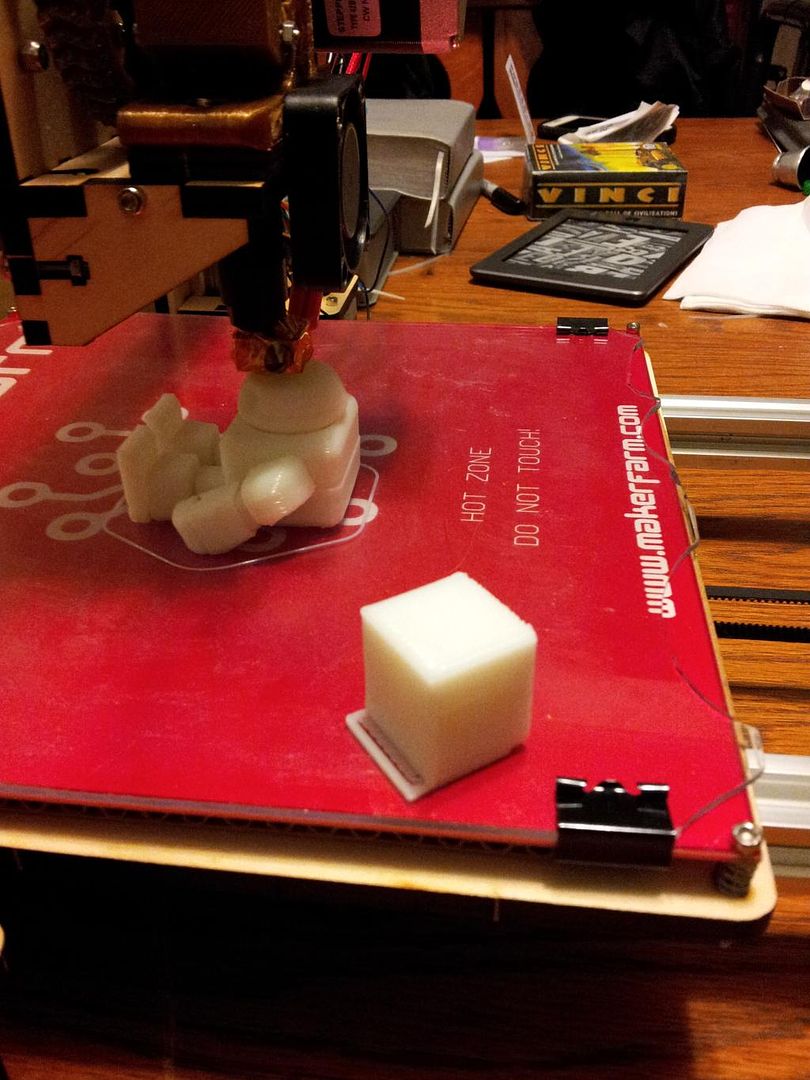
The Y axis belt was too loose which led the belt to skip, shifting the print after the 1st layer. Most of the cube printed well except at the last layer where the loose belt skipped again. The next picture shows that. I removed the belt and shortened it by making the loops longer. The problem seems to be gone.

Now cubes are all well and good but I wanted to do something fun. Make magazine recently released their 3d printer issue and there is a load of good tests in there to pick from. But why not be ambitious? I decided to go for the MakerFaire robot (www.thingiverse.com/thing:331035/). It's a printed in place articulated robot (joints at feet, knees, hips, shoulders and neck). I loaded up the code from slic3r and then went grocery shopping. When I got home:
95% done. The print finished in 2:40. I had lowered the feed rate to 84% thinking that the slower feed would make the details smoother. Here is the robot next to the cube for comparison (I did the 65% version)
It looked great when the print ended. Now, I've been using Elmer's glue stick for adhesion and it is a bit of a bear getting stuff off. The robot had no intentions of coming off, it too a bit of doing. Looked nice but would the articulations work?
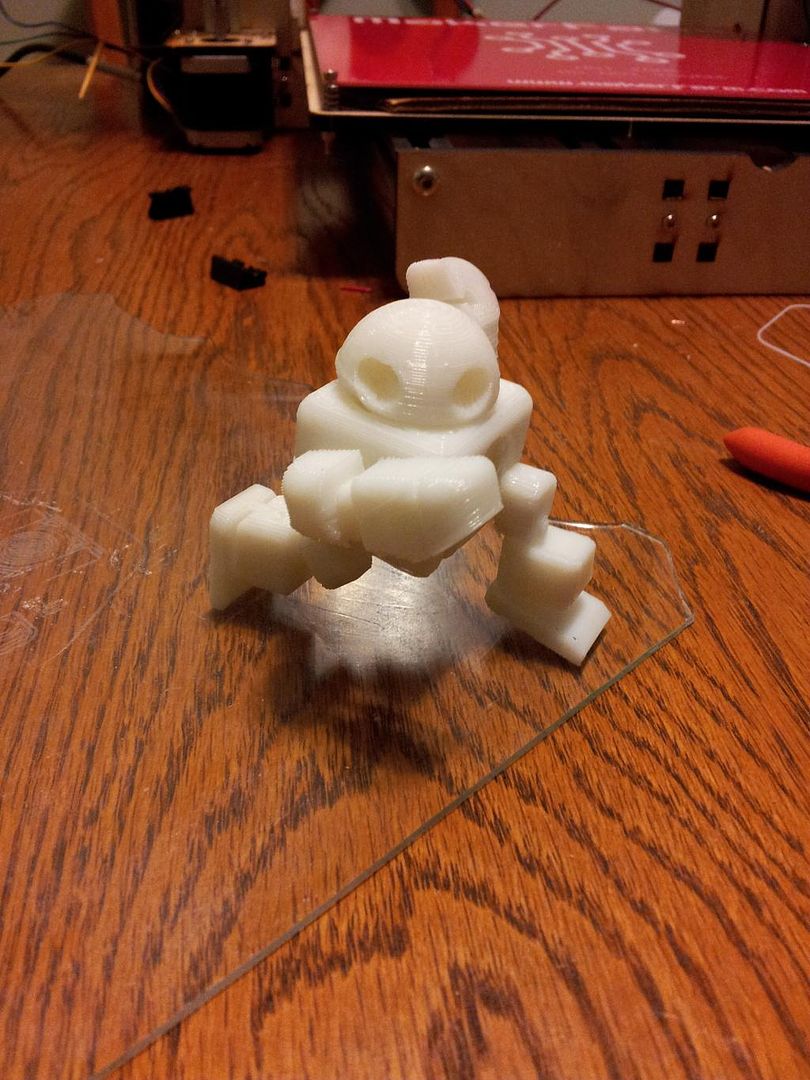
They did! Now, to be completely honest, I snapped one of the legs off at the hip. I was a little too vigorous when I was trying to loosen up the joint and it broke off (I may have also damaged it trying to get the robot off the glass). Nonetheless, it's impressive considering this is my 2nd print on this machine, I've done no calibrations (all I did was load the file Colin provides for slic3r) and machines that cost $2-3,000 had trouble completing this print. I followed dacb's suggestion and had my family come over to see what the printer can do and everyone is extremely impressed. My kids especially. I have a feeling the machine will be busy.

 Reply With Quote
Reply With Quote



New to 3d printing looking for...
05-20-2024, 12:56 AM in Tips, Tricks and Tech Help