


Results 1 to 10 of 354
Thread: 370mm X 250mm X 300mm
Threaded View


-
05-27-2021, 04:47 PM #11Staff Engineer

- Join Date
- Jul 2016
- Location
- South Florida, USA
- Posts
- 1,248

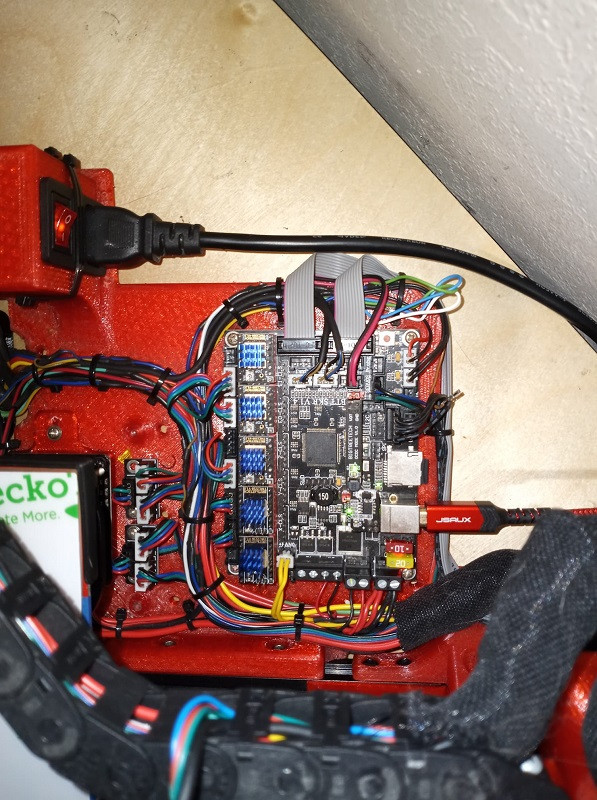
So I fixed my Z issue and without the closed loop steppers and drivers. On the SKR 1.4 and 1.4 Turbo there is dual Z support baked into the mainboard. This is 2 Z stepper connectors tied to one Z stepper socket. I unplugged one stepper from this and ran it to E1, set up dual Z in marlin and gave each Z motor it's own driver. Now when I go up 330mm and come back down 330mm I am still at the same Z height on both sides. The only downside is now all the stepper sockets are occupied but to be honest that would have been the way with the closed loop drivers. Here is the physical configuration on the SKR 1.4 Turbo mainboard..
And the closed loop drivers might go on the TronXY for X and Y just because the displays would look cool where the X and Y motors are. I just have to find some real world comparisons between the noise levels and performance differences between these and the TMC 2226 drivers.

 Reply With Quote
Reply With Quote



New to 3d printing looking for...
05-20-2024, 12:56 AM in Tips, Tricks and Tech Help