


Results 1 to 10 of 10
Threaded View


-
09-27-2021, 02:34 PM #2Staff Engineer

- Join Date
- Jul 2016
- Location
- South Florida, USA
- Posts
- 1,248

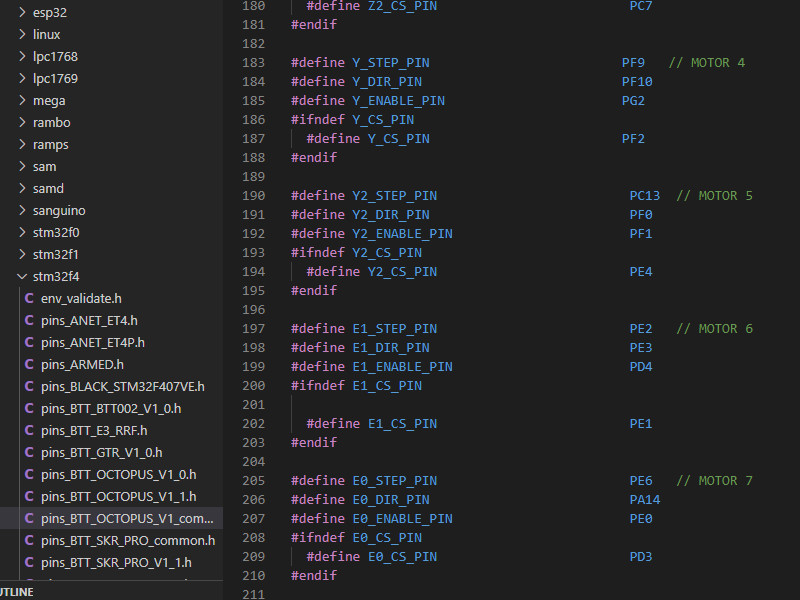
Once all the steppers are identified we can go look at the pins file. For this we need to click on the src tab under Marlin, then click the pins tab, then find your board. For me it was under stm32f4 and because there are 2 versions of the BTT Octopus there are multiple pins files. There is a seperate file for each version and then there is a common file. We want the common file. And in it we will find a legend that identifies what pin everything goes to. We want to find the steppers. On the Octopus the motor connectors on the mainboard are not labeled with axes. Rather they are simply labeled motor 0, motor 1, motor 2, etc..
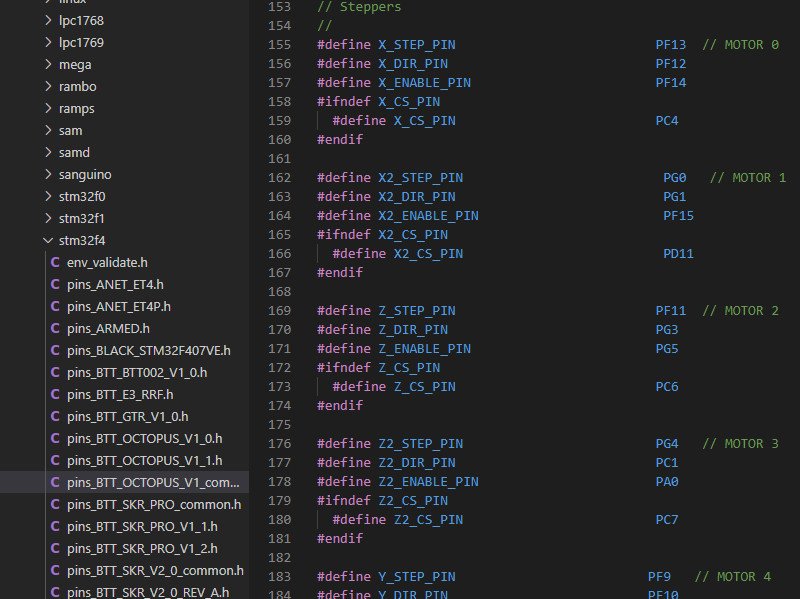
Here is where we will relabel our axes so that the pins are labeled to what they are. I have already configured these for my IDEX. Please note where I only changed the letters on each axis to achieve my programming goals here. Simple and easy. This is how Marlin will know what Z2 is. If you are plugged into E1 on tha mainboard you will just change all of it's labels from E1 to Z2 as you see here..

 Reply With Quote
Reply With Quote



Please explain to me how to...
Today, 12:15 PM in 3D Printer Parts, Filament & Materials