


Results 1 to 10 of 15
Hybrid View


-
04-25-2015, 05:27 AM #1Student

- Join Date
- Feb 2015
- Posts
- 22
I finally found time to fix electronics.
Main change: I switched to power source with higher voltage (from 5V to 7.5V) - this gives more strength to the legs. One of the main problems was that it was having hard time standing on the legs after putting so much plastic on it. The robot weights ~5kg now. New and shiny power source:

Of course RaspberryPi still needs 5V, so I had to put voltage stabiliser. That leads to some energy loses, but who cares when you're not planning to use batteries and you have 26A )
)
I also had to switch to shorter and thicker power cables for servos. And better plugs for those cables too. I'm glad I didn't have to pull any new cables through internals of the robot - it would be very hard to do at this point Although I still had to put a relay in the back and some thick cables. It doesn't look nice (when it's open), but it works!
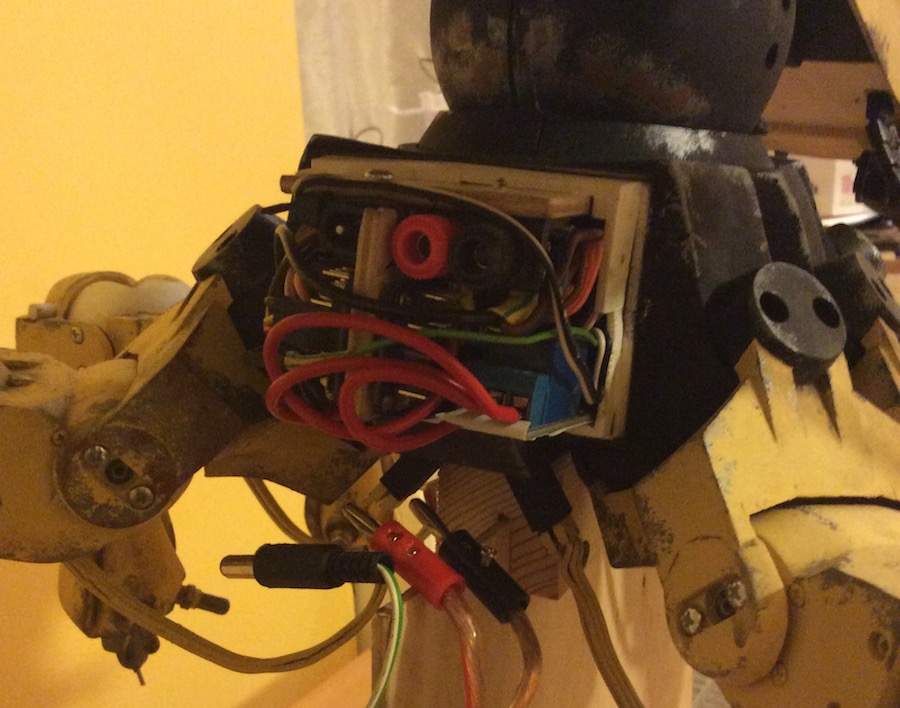
I found out that servos in arms take 6V max, so I had to put another voltage stabiliser Any change is never as easy as it seems at first sight



 Reply With Quote
Reply With Quote



Ender 3 Neo - Jam Problem
05-08-2024, 03:06 PM in Tips, Tricks and Tech Help