


Results 1 to 1 of 1
-
10-16-2014, 06:18 AM #1Administrator

- Join Date
- Jan 2014
- Posts
- 7,697

3D Printing Pneumatic Actuators For MRI Guided Robot Use
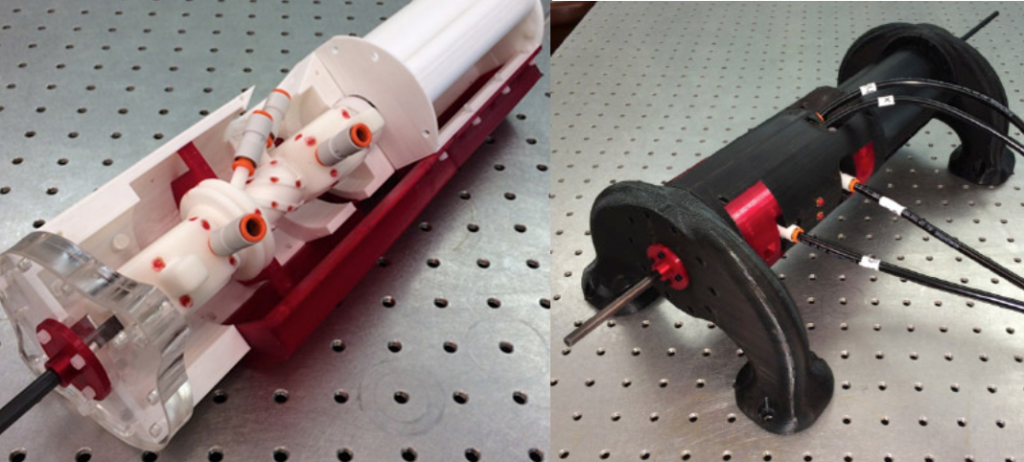
Using a Makerbot Replicator 2, a team of research engineers at Milwaukee School of Engineering and Vanderbilt University have created a prototype pneumatic stepper actuator that could be used to give functionality to an MRI guided surgical robot. The development of a pneumatic actuator as opposed to a DC motor was required by the high stress environment created by the MRI in which magnetism and radiofrequency pulses render the DC motor inoperable. The MRI guided surgical robot is used to allow the surgeon to visualize the needle being used in an operation for patients suffering from treatment-resistant neurological disorders. The key to the creation of this pneumatic actuator lies in the innovative bellows design, something that was made possible only because of the availability of 3D printing. More details on this research can be found here: http://3dprint.com/18468/3d-printed-pneumatic-actuator/
Below is a picture of the 3D printed Pneumatic Actuator


 Reply With Quote
Reply With Quote



Extruder not feeding during print,...
04-24-2024, 01:59 AM in Tips, Tricks and Tech Help