


Results 1 to 10 of 354
Thread: 370mm X 250mm X 300mm
Threaded View


-
05-30-2021, 09:02 PM #11Staff Engineer

- Join Date
- Jul 2016
- Location
- South Florida, USA
- Posts
- 1,248

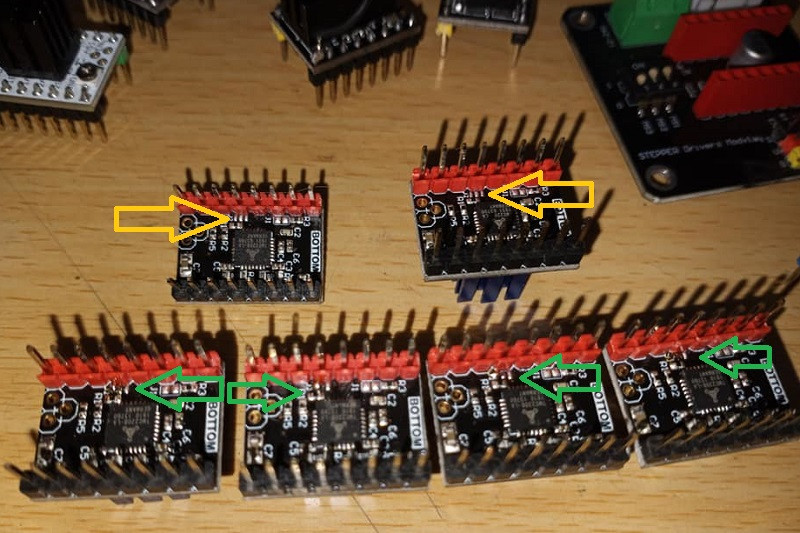
My Printer is back up and running and at the moment 1h and 22m into printing that leg again. To make it work I had to take the Y axis away from UART and run it in standalone. I have a bunch of stepper drivers. So I sorted out all the tmc2208 v3.0 stepper drivers I have. I actually have these prepped both ways. Some are standalone, some are UART. The way we quickly identify which are which is by flipping them over and looking at the small solder pads. Typically if there is no solder then the drivers are configured for standalone and UART or SPI required soldering jumpers across pads. In the below picture the Yellow arrows up top are pointing to the 2208 drivers configured for standalone and the bottom row has green arrows pointing to the soldered jumpers making the drivers ready for UART communications..
With a pair of the correct standalone drivers selected I set the pot to 1.3v on each and put jumpers in ms1 & ms2. And made sure the dip switches for ms1 & ms2 were in the on position on the stepper driver expansion board. The one tmc2226 driver that was running the pair of steppers before was set in the firmware to 1.9v. Split in half that's 0.8 for each motor but now there is 0.5v more to each stepper and twice the surface area for cooling the driving circuit. I feel good about this and can't wait for the next 12 hours to pass to see if it makes it further than the last time. My electrical center is getting busy. I might have to redesign all this at some point. Or just upgrade that board to something with more stepper motor sockets..
At this point I am so happy I am finishing up building a coreXY. Oh I can't wait to finish it.

 Reply With Quote
Reply With Quote



Extruder not feeding during print,...
Today, 02:02 PM in Tips, Tricks and Tech Help